machine-learning-nanodegree
Class notes for the Machine Learning Nanodegree at Udacity
Go to IndexMarkov Decision Process
Comparison of Learning Types
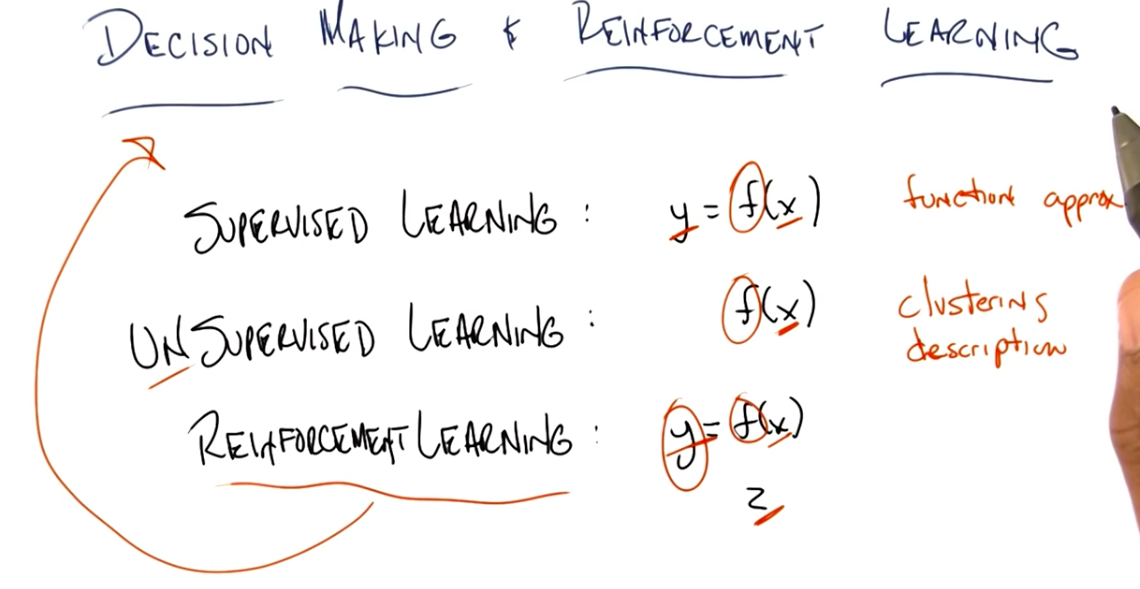
In Supervised Learning, we are given y and x and we try to find the best function f that fits f(x) = y.
In Unsupervised Learning, we are given x and we try to find the best function f that produces a compact description of x in the form of f(x) clusters.
In Reinforcement Learning, we are given x and z and we try to find f and y, where f(x) = y. It looks a lot like supervised learning, but the main difference is that we are not given the labels (y), but instead the reinforcers and punishers (z) to adjust the function f.
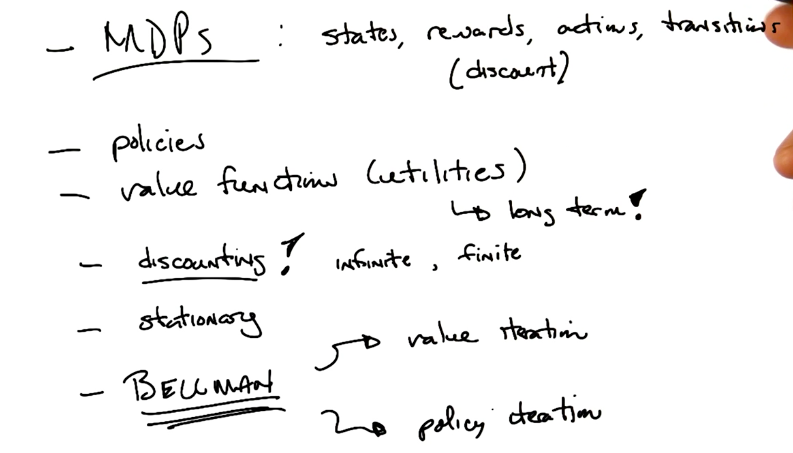
Markov Decision Process Explained
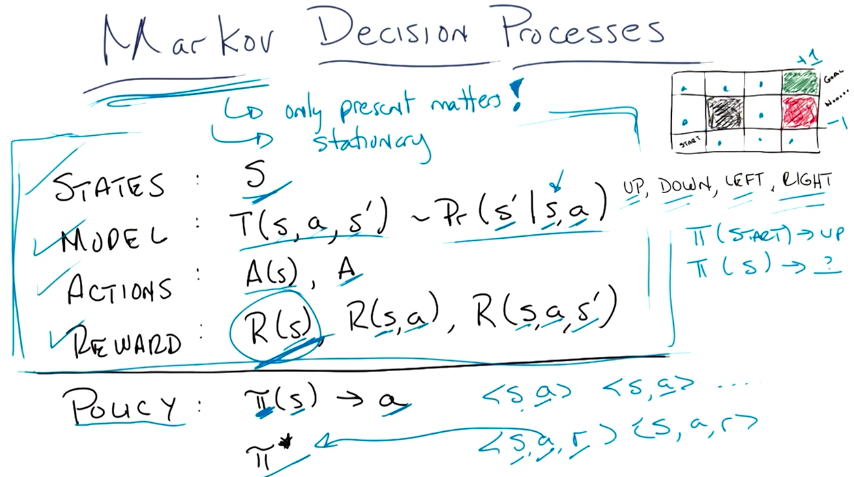
Markov Assumptions
- Stationary. Actions, states and the model can’t change. The agent is the only element of change on the model.
- Only present matters. The transition function should only evaluate the current state to determine the probability of the outcome.
Image Explained
- States:
S- represents all the possible states that the agent may be in. - Model:
T(s, a, s') -> Pr(s' | s, a)- represents the transition function, which outputs the probability of the agent reaching states'by taking actiona, given that it is in states. - Actions:
A(s) or A- represents all possible actions for each state. Actions are usually constant for all states, so they are represented byA. - Reward - represents the agent’s reward
R(s): being on statesR(s,a): being on statesand taking actionaR(s,a,s'): being on states, taking actionaand achieving states'.- All these representations provide the same mathematical value and can be modeled by
R(s)alone.
- Policy - represents the “master plan” to solve the problem. It is represented by a mapping of states to actions
π(s) -> a, where for any given statesit outputs the best course of actionato take.π*represents the optimal solution - the mapping that maximizes the rewards.
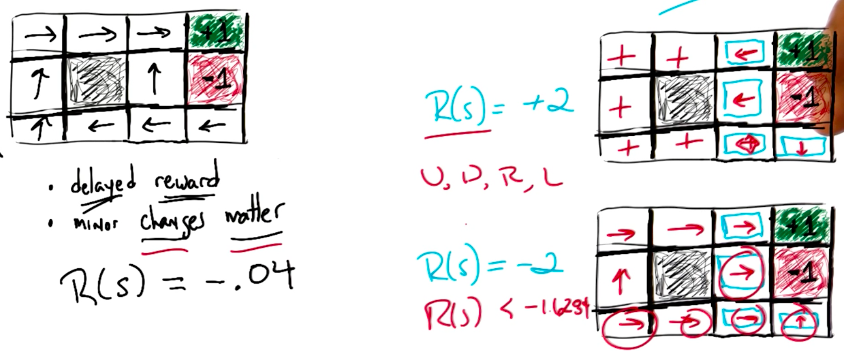
More on rewards
Some examples of Policies affected by different rewards:
Sequence of Rewards: Assumptions
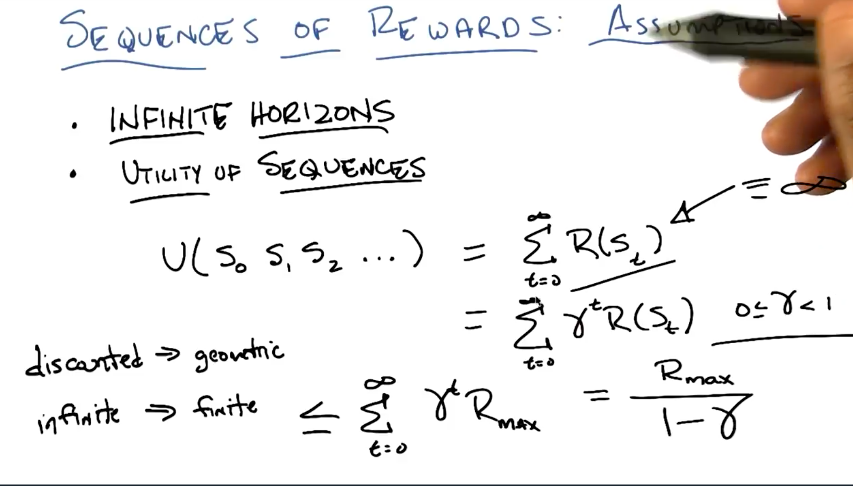
Infinite Horizons
Infinite Horizons means we can take as many steps as we want through the MDP.
Utility of Sequences
Utility of Sequences measures the total reward value of a given sequence of steps.
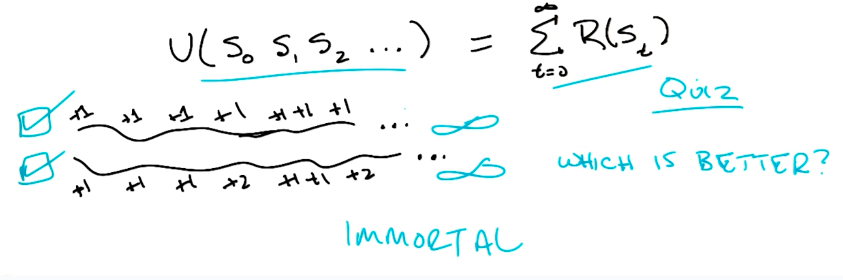
Sum of each step reward
The sum of all rewards for each step is not a good measure of utility because, assuming we are working with infinite horizons, we will have infinite and all sequences will always provide infinite utility, as shown below.
Discounted Rewards
Discounted rewards is a geometric sequence that provides a finite number to measure the utility against sequences.
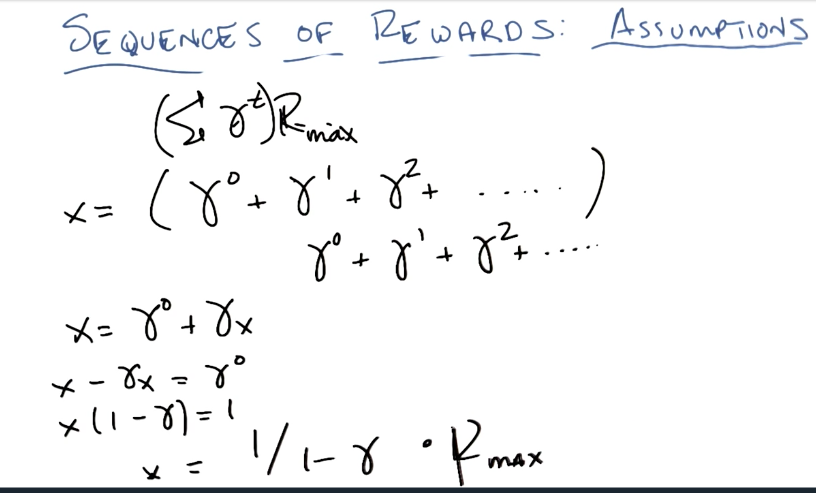
Maximization of discounted rewards:
which is demonstrated by:
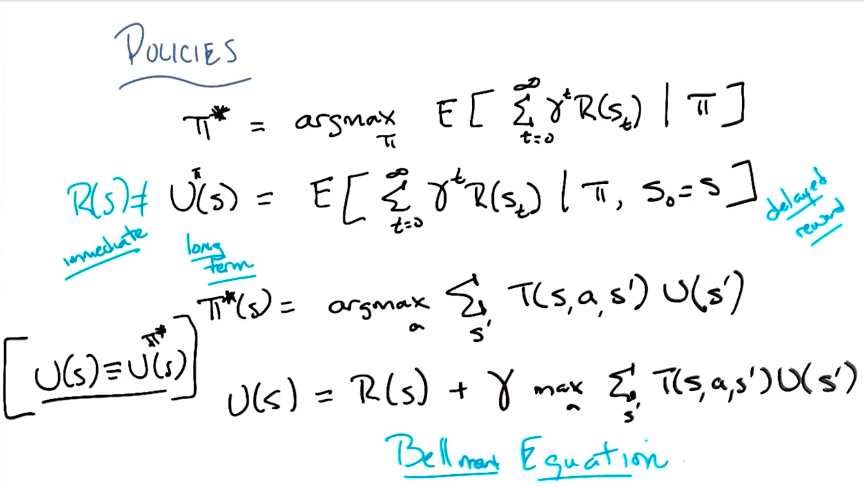
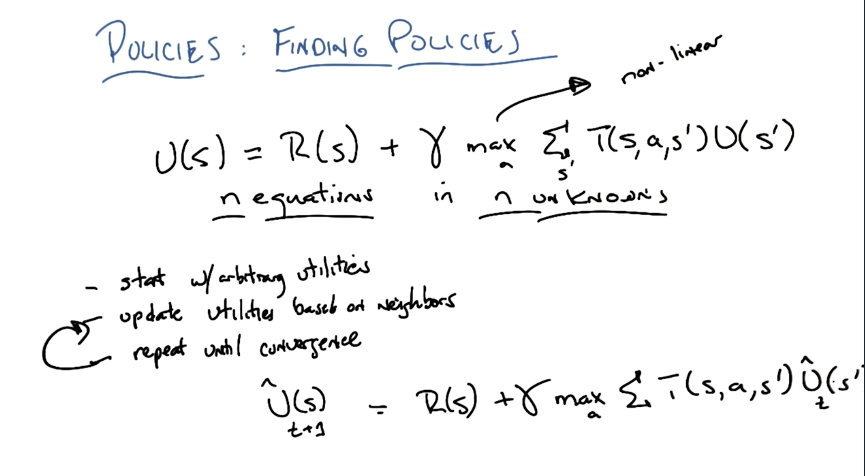
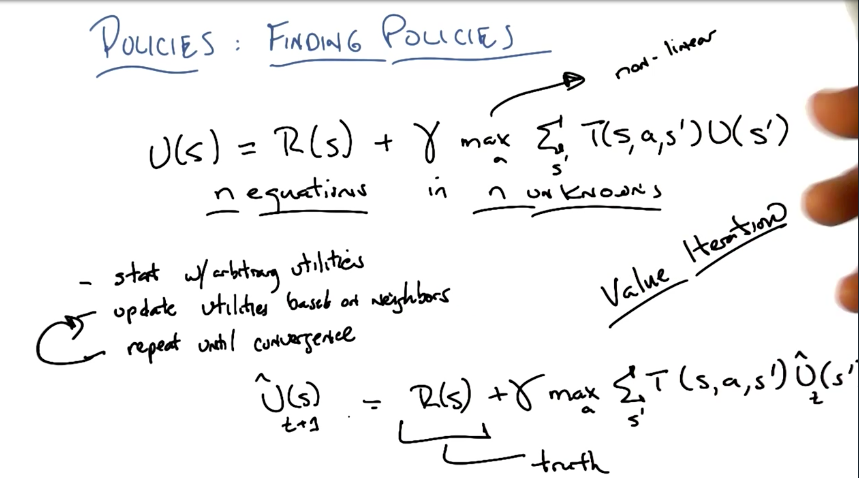
Bellman Equation
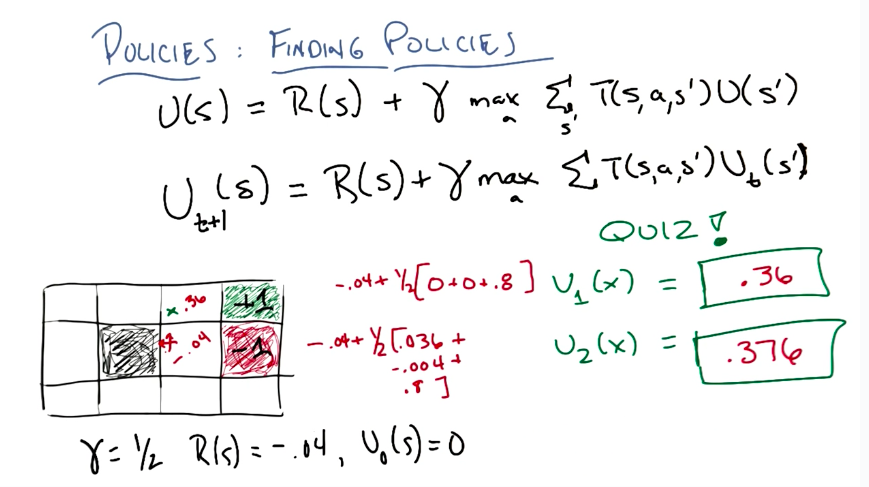
Algorithmic Solution
Example (Quiz)
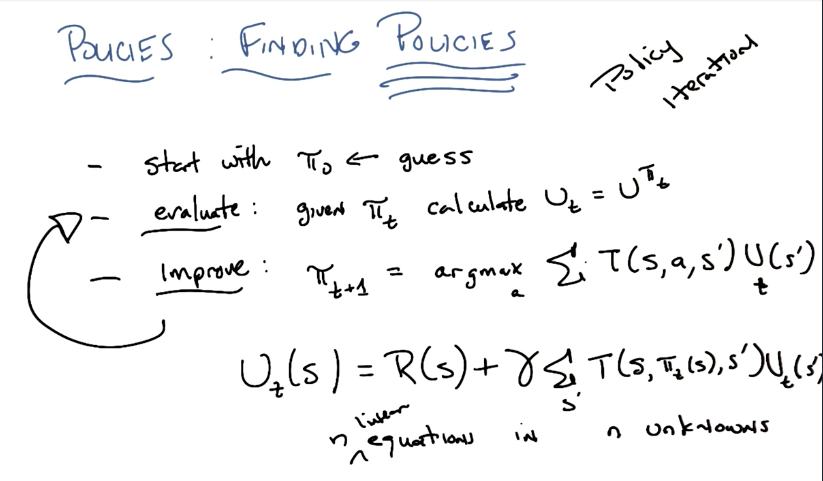
Finding the Policies
While the solutions presented above find the true Utility Values for each state, we are not interested in finding these values, but instead we are interested in finding the Optimal Policy.
The image below shows a simplification of the solutions elaborated previously to solve this.
Summary